 Crunch
Crunch


 Евгений
Евгений
 Юрий
Юрий
 Юрий
Юрий
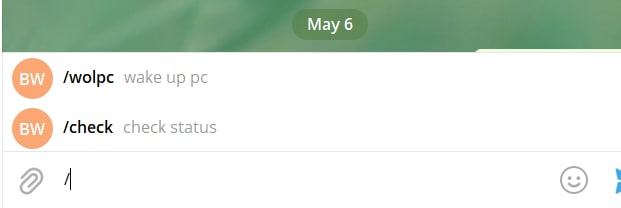
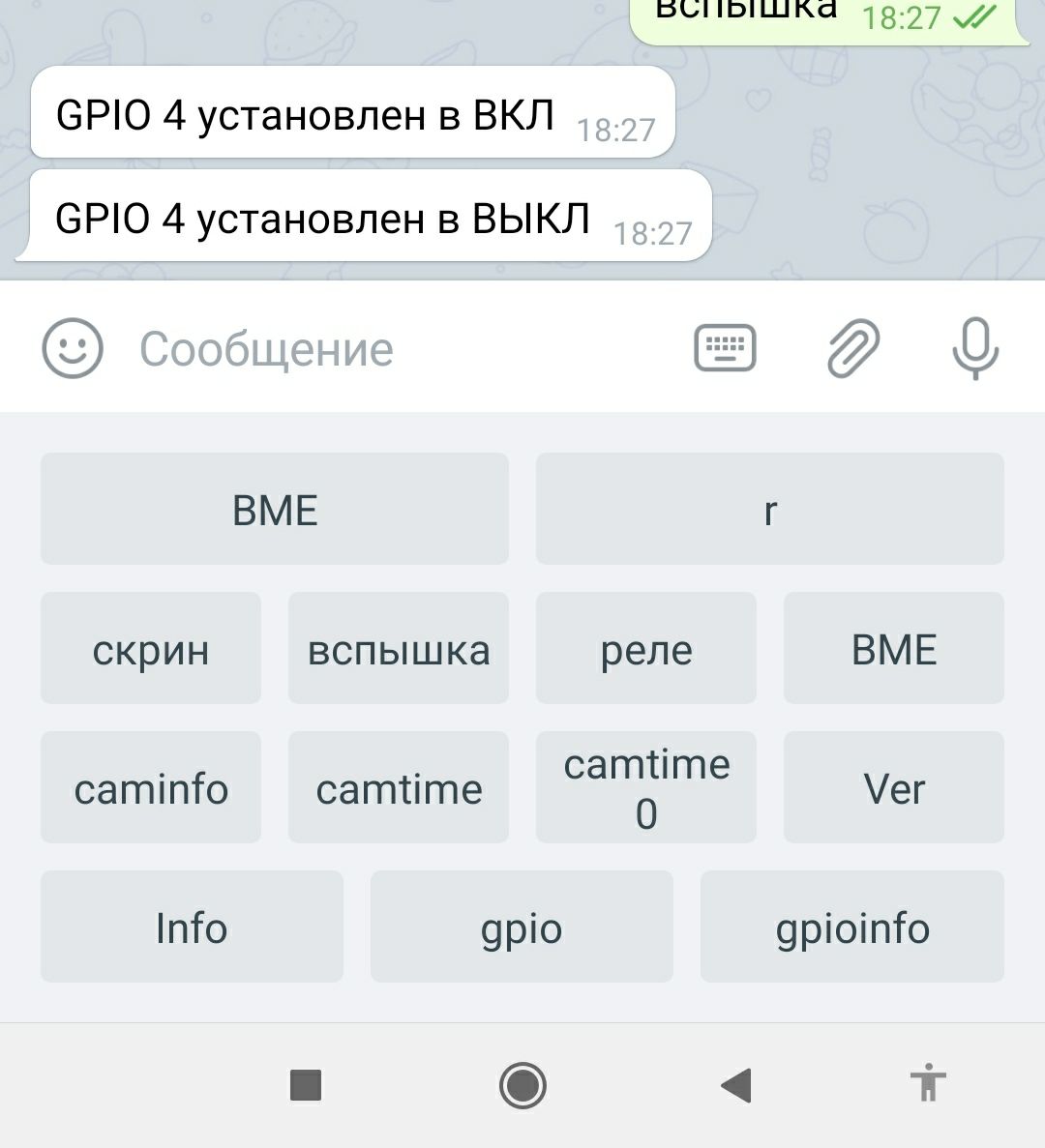
Этот пример и есть, за время переписки его уже можно запустить, и поправить команды под себя😁
Maxim
Maxim
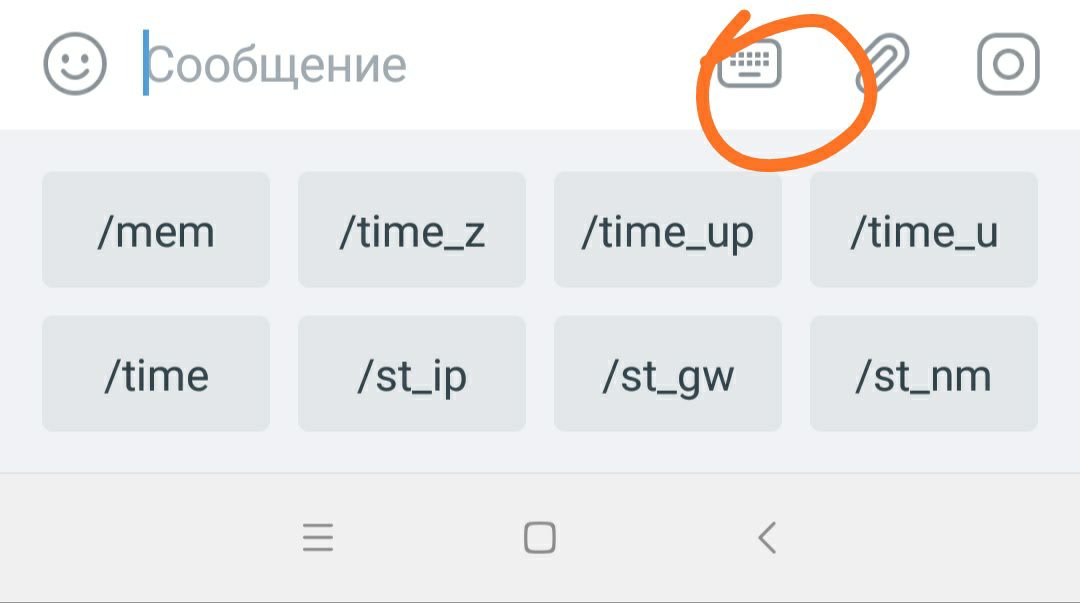
/setcommands
Юрий
 /dev/null
Maxim
/dev/null
Maxim
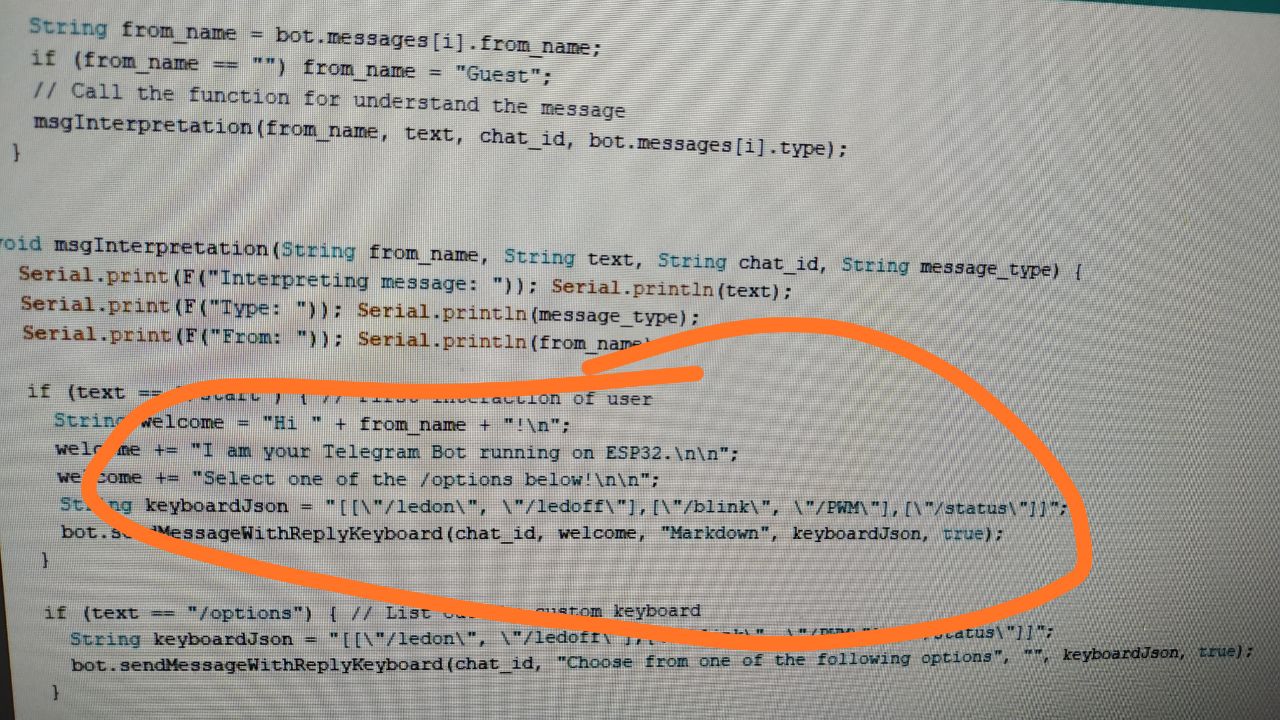
Юрий а можно фрагмент кода с примером пожалуйста
Юрий
Юрий а можно фрагмент кода с примером пожалуйста
У меня не ардуино, загуглить пример, там это все а несколько строк.
Юрий
 Юрий
Юрий
Фото с удаленного стола, пример Advanced led
Maxim
 великий
великий
Кто подскажет регулятор для сильно инерционных систем с "низким трением"? Типа как ракета в космосе. Когда чтобы попасть в нужную координату ракете нужно пол дороги разгоняться и с пол дороги уже тормозить чтобы не проскочить.
ПИД-регуляторы не справляются. Или я не умею его настроить.
ПИД регулятор "не знает" что в системе почти нет трения и что даже чуть толкнув ее к цели система сама не остановиться и нужно заблаговременно включать реверс. Есть такие библиотеки и как оно должно называться?)
великий
ага икогнето)
да проблема именно как при посадке возвращаемых модулей. Нужно заблаговременно и точно затормозить)
великий
Мне бы хотя бы ключевое слово как называется такой тип регулирования? Дальше бы нашел.
Задача чуть проще чем посадка. Допустима стабилизация положения за минимальное число итераций. То есть чуть проскочил вернулся, и так за 2-3 цикла чтоб устаканилось.
Нужно чтобы регулятор был самообучаем и быстро понял какая инерция и какое трение. Главное чтобы включал реверс заблаговременно, без этого точно никак.
великий
Так вроде PID и получается
ПИД пока не проскочит реверс не включает. Хотя может я чего-то и не знаю...
v
ПИД пока не проскочит реверс не включает. Хотя может я чего-то и не знаю...
Ну.. Это ведь как написать. Интегральная составляющая. PID для того и нужна.
 romanetz
romanetz
Вы управляете ускорением, а уставка - координата
romanetz
 BlueBeard
BlueBeard
ага икогнето)
да проблема именно как при посадке возвращаемых модулей. Нужно заблаговременно и точно затормозить)
если для отопления то увеличивайте период дифференцирования и тогда наступит стабилизация
romanetz
Посмотрите, как сервоприводы устроены, там ведь так и есть. Петля тока (момента) - ускорение, петля скорости (частота) и петля координаты
великий
если для отопления то увеличивайте период дифференцирования и тогда наступит стабилизация
не. Не для отопления, в отоплении нормальное "трение". Для координат. Например тяжелая тележка на скользкой поверхности.
romanetz
У вас текущее положение известно?
romanetz
Значит для петли положения уже будет сигнал ошибки нормальный
великий
Значит для петли положения уже будет сигнал ошибки нормальный
хорошо, спасиба...
А что такое "петли"? )
romanetz
PID control loop )
romanetz
Система, охваченная обратной связью...
великий
ага)
v
Скорость ведь тоже можно в обратную связь включить
romanetz
В ПИДе интегралка - это координата, если рулим скоростью, дифференциалка - ускорение, ну и пропорционалка - отклонение скорости от уставки
BlueBeard
не. Не для отопления, в отоплении нормальное "трение". Для координат. Например тяжелая тележка на скользкой поверхности.
думаю идея та же сильно инерционная система, смотреть за какой период происходит какая то реакция на команду, (пример открыл задвижку -> пошло изменение температуры) и вот этот период*x использовать в регулировании
romanetz
А вы в тележке чем рулите?
romanetz
Током двигателя её привода?
великий
обычный шим... Наверное током. Но пока обратную связь не использовал, хотя есть такая возможность по току.
romanetz
Просто, в вакууме тяга - это впрямую ускорение. ЭД постоянного тока имеет и конечный момент, и конечную скорость - от конструкции зависит.
romanetz
обычный шим... Наверное током. Но пока обратную связь не использовал, хотя есть такая возможность по току.
Обычный ШИМ регулирует приложенное напряжение к обмотке
romanetz
Только не переменного, а постоянного тока
великий
хм. Считаете нужно регулировать именно пропорционально ток? Измерять и подстраивать?
С петлей координат понятно, от нужной отнимаем текущую и получаем ошибку. А с чем сравнивать текущий ток? Какой ток выбирать ка "нужный"?
romanetz
Ток задаётся двумя петлями
romanetz
Скорость(учитываем противоэдс) и ускорение(момент)
romanetz
Учитываем L и R обмотки и якоря
великий
думаю идея та же сильно инерционная система, смотреть за какой период происходит какая то реакция на команду, (пример открыл задвижку -> пошло изменение температуры) и вот этот период*x использовать в регулировании
Допустим до цели 1метр. Дав 10% ШИМ тележка доедет до цели за 2 секунды. А дальше отключив в момент достижения цели двигатель тележка проедет по инерции еще 20 метров. Мне трудно понять как тут как подбирать коэффициенты ПИД.
И как использовать в обратной связи более чем один параметр.
великий
Если сделать пропорциональный коэффициент Kp очень маленьким, то достижение цели будет неприемлемо долго. Если большим, то будет неприлично огромное перерегулирование.
Alexey D.
Если сделать пропорциональный коэффициент Kp очень маленьким, то достижение цели будет неприемлемо долго. Если большим, то будет неприлично огромное перерегулирование.
Калибруй на медленной скорости один раз ? (я только про тележку прочитал)
великий
Проблема еще наверное в том, что малые скорости получить трудно. На малых значениях ШИМ двигатель просто отказывается запускаться...
romanetz
Потому, что надо преодолеть инерцию и трение
romanetz
Я же уже объяснил - вам нужен ПИД-регулятор по ускорению тележки
romanetz
Он будет отрабатывать инерцию и трение
romanetz
Ускорение, причём, ограничено трением (движение без пробуксовки)
великий
то есть подсовывать в пид не расстояние до цели (как счас) а текущее ускорение?
Или нужно подсовывать и то и другое?
Но как я не понимаю как отрабатывать более чем один входной параметр. В теории пид-регуляторов всегда указывается только один входной параметр и один выходной.
romanetz
Погуглите каскадные регуляторы
romanetz
Один регулятор управляет вставкой другого
великий
ага! спасибо
romanetz
то есть подсовывать в пид не расстояние до цели (как счас) а текущее ускорение?
Или нужно подсовывать и то и другое?
Но как я не понимаю как отрабатывать более чем один входной параметр. В теории пид-регуляторов всегда указывается только один входной параметр и один выходной.
У вас есть расстояние до цели, генерируете профиль движения по определённому закону, самое простое - треугольник или трапеция
romanetz
Это я имею в виду график скорости от времени
великий
что-то начинаю понимать
romanetz
Дальше, график ускорения у трапеции - два прямоугольника - один в начале, другой в конце
romanetz
У треугольника - без нулевого участка по ускорению, там сначала полдороги разгон, потом торможение
romanetz
Это самый быстрый способ доехать
romanetz
Площадь под прямоугольником a(t), t - скорость
великий
romanetz
Физика, 8 класс
великий
ну это понятно )
Я просто не мог преодолеть барьер понимания что может быть более чем один регулятор в системе и что можно регулировать систему в том числе и по абстрактной модели.
romanetz
feedforward - это ещё отдельный прикол )
D.S.
товарищи помогите пожалуйста чего он хочет?
c:/users/phoenix/appdata/local/arduino15/packages/esp8266/tools/xtensa-lx106-elf-gcc/2.5.0-4-b40a506/bin/../lib/gcc/xtensa-lx106-elf/4.8.2/../../../../xtensa-lx106-elf/bin/ld.exe: C:\Users\Phoenix\AppData\Local\Temp\arduino_cache_574336\core\core_257d3c41a9407c4067ca63c7a7537c51.a(core_esp8266_main.cpp.o): in function `__loop_end':
C:\Users\Phoenix\AppData\Local\Arduino15\packages\esp8266\hardware\esp8266\2.7.4\cores\esp8266/core_esp8266_main.cpp:185: undefined reference to `loop'
c:/users/phoenix/appdata/local/arduino15/packages/esp8266/tools/xtensa-lx106-elf-gcc/2.5.0-4-b40a506/bin/../lib/gcc/xtensa-lx106-elf/4.8.2/../../../../xtensa-lx106-elf/bin/ld.exe: C:\Users\Phoenix\AppData\Local\Temp\arduino_cache_574336\core\core_257d3c41a9407c4067ca63c7a7537c51.a(core_esp8266_main.cpp.o): in function `loop_wrapper()':
C:\Users\Phoenix\AppData\Local\Arduino15\packages\esp8266\hardware\esp8266\2.7.4\cores\esp8266/core_esp8266_main.cpp:192: undefined reference to `loop'
collect2.exe: error: ld returned 1 exit status
exit status 1
Ошибка компиляции для платы NodeMCU 1.0 (ESP-12E Module).
romanetz
loop() нет в вашем коде
ㅤ
Задавайте корректные вопросы, расписано, что не получается, какая выходит ошибка, что и как делаете, искали ли в сети ответы на свои вопросы. Распишите хотя бы примерное Т.З. только тогда вам возможно ответят. Может вы не знаете как правильно составить поисковый запрос - то напишите об этом. Если вы не искали сами может Вам лень, а может просто написали поболтать, то этот чат не для любых свободных тем, а именно по теме названия группы. Если 3 и более участника(постоянные) чата проголосуют за систематические нарушения и не желания прочитать. Вы будете заблокированы к примеру на 2 недели, а дальше посмотрим. К сожалению мне приходится вводить такие простые правила да бы больше не обсуждать однотипные постоянные вопросы которые возможно обсуждались здесь уже либо ответы 100% есть в сети. #вопрос #ответ #google #политика #правила
 Slava
Slava
 Andrew
Andrew
 Евгений
Евгений
Предлагаю расширить список санкций ещё и на глупые и бесполезные ответы.
Прострелить колено?