Я понял что хлам, а твоя чем лучше?
Она не спит
 Н Е К И Б Е Р Л Е О
Н Е К И Б Е Р Л Е О

 Н Е К И Б Е Р Л Е О
Н Е К И Б Е Р Л Е О
Еще раз
 Anonymous
Anonymous
Постоянно спит и непостоянно 😄
Anonymous
То есть она год работает, а потом батарейка садиться
 Текст голосового сообщения:
Текст голосового сообщения:
От Н Е К И Б Е Р Л Е О :
Не распознано
Anonymous
Все понял, спасибо
Anonymous
Значит если постоянно, то она раз в секунду где то шлет
ㅤ
шаговый небось
Типа как в вентиляции заслонка наверно открывается и закрывается? Хотя трубы цельные сделаны все акуратно
Н Е К И Б Е Р Л Е О
Н Е К И Б Е Р Л Е О
Не..ну можно шарик внутри надувать;))))))))
Н Е К И Б Е Р Л Е О
Эта.. мне надо будет скуд в дверце вырезать .. и сделать.. как проще? Размер-кот
ㅤ
Эта.. мне надо будет скуд в дверце вырезать .. и сделать.. как проще? Размер-кот
Вроде кто то делал тут @SlavaZagaynov вроде
 ㅤ
ㅤ
Готовое не предлагать
Нет это как идея )) конечно только хардкор естественно )) мы тут все такие 😂
 garik
garik
Главное - чтоб кота не прищемило
Н Е К И Б Е Р Л Е О
Соленоид пружина...магнит возможно
Н Е К И Б Е Р Л Е О
А то отвез котессу на вторую вязку..если все ок.. через 65 дней котобаза будет
 IgorAlekseev.com
ㅤ
IgorAlekseev.com
ㅤ
Соленоид пружина...магнит возможно
https://a.aliexpress.com/_AZPfqk Типа такого? Надо наглухо закрывать?
Н Е К И Б Е Р Л Е О
https://a.aliexpress.com/_AZPfqk Типа такого? Надо наглухо закрывать?
Втягивающий думаю просто
Н Е К И Б Е Р Л Е О
Но это пока не точно
Н Е К И Б Е Р Л Е О
 Anonymous
Anonymous
 Anonymous
Anonymous
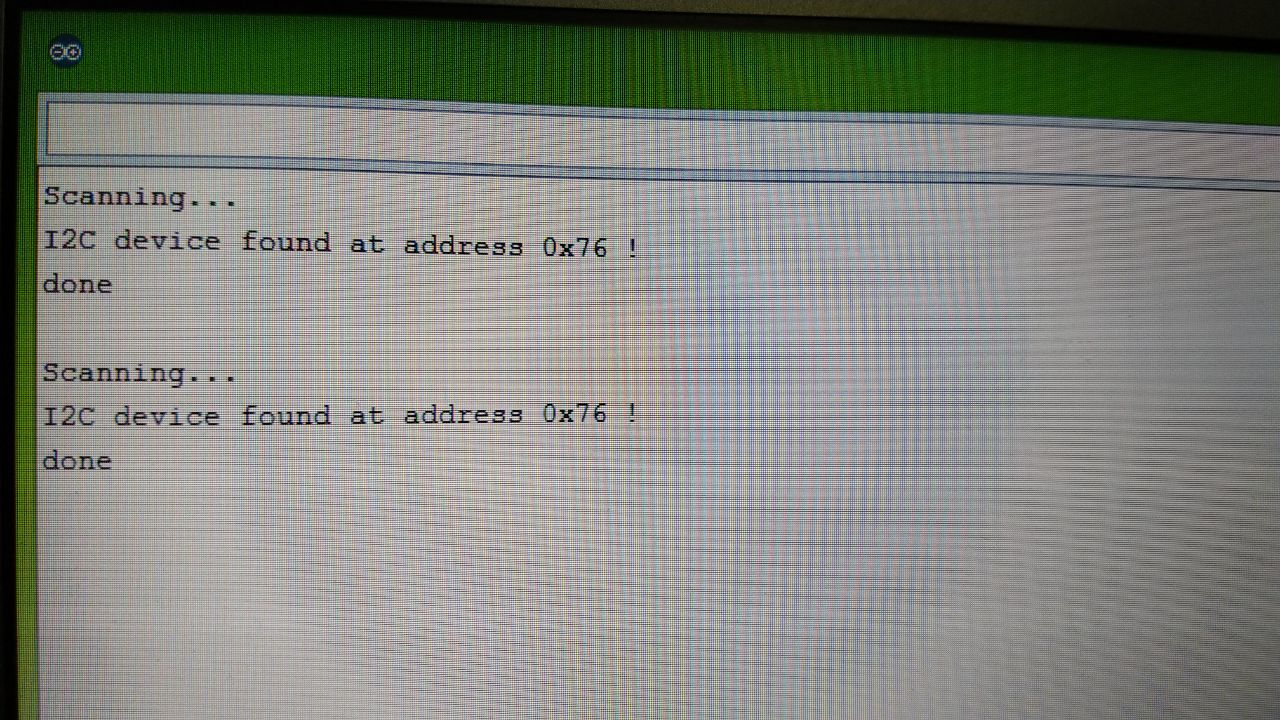
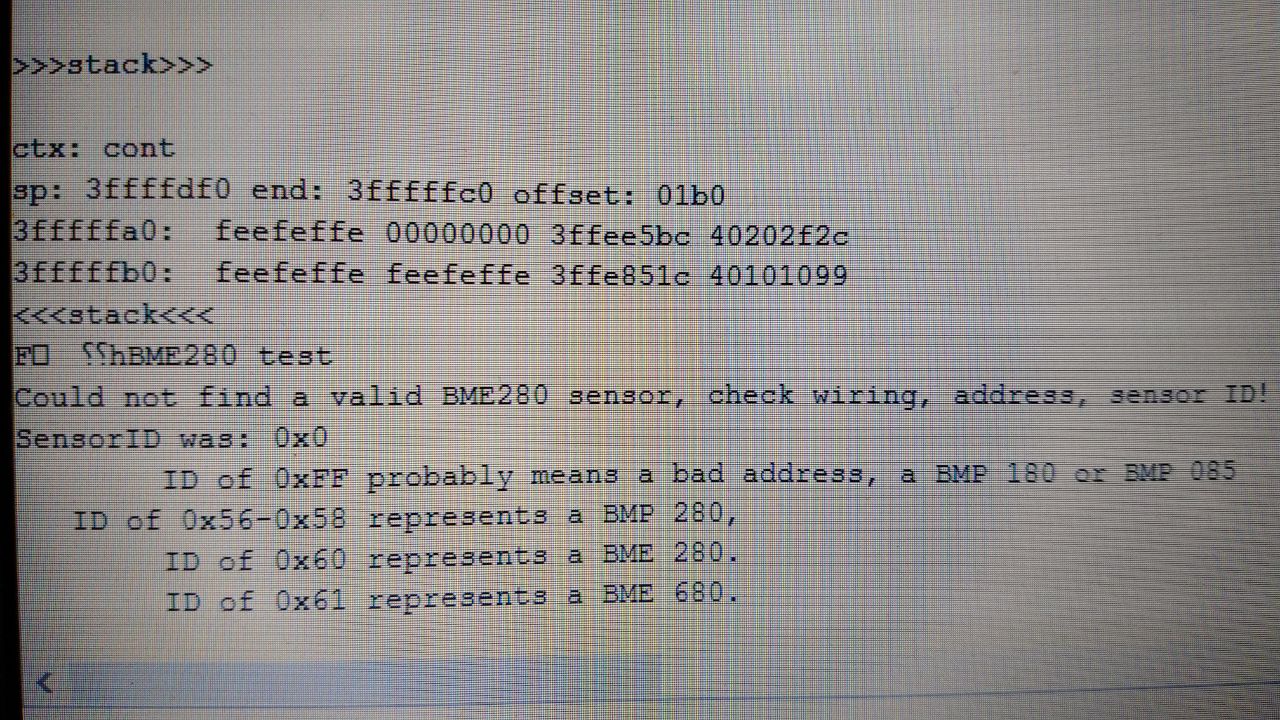
Может кто подскажет, датчик как bme280, отзывается на 0x76
Anonymous
Но не читается
Anonymous
Надпись B04U 06
Anonymous
Или 804U
 Серж
Серж
Может кто подскажет, датчик как bme280, отзывается на 0x76
уверен, что не bmp ??? у меня знакомый обращался ... сканером i2c видится, а не читался ...
просто взяли другие библиотеки ...
 Василий
Василий
прочитайте ID датчика и будет понятно
BME_ID 0x60
BMP_ID 0x58
Anonymous
уверен, что не bmp ??? у меня знакомый обращался ... сканером i2c видится, а не читался ...
просто взяли другие библиотеки ...
Да, ошибся по корпусу похож на bmp
 Andre
Andre
Немного оффтоп, чисто теоретический вопрос, просто засел в голове, а знаний не хватает, чтобы ответить на него самостоятельно, и перестать думать.
Возможна ли передача радиосигнала с полезной нагрузкой на заданное очень маленькое расстояние (то есть не дальше чем заданное расстояние, измеряемое десятками сантиметров), и всё это за дёшево?
То есть можно ли сделать передатчик, которому можно сказать: передавай на 10 сантиметров, на 20 сантиметров, 30, 40... и где-то до метра.
И приёмник, который находится дальше заданного расстояния, уже не примет (либо проигнорирует) сигнал?
Для понятности искусственный пример: имеется двадцать маленьких роботов, размером с тарелку.
У каждого робота есть код, который он может передать в эфир (у одного робота число 1234, у другого 5941, у третьего 0694 например).
И они играют в догонялки — хаотично носятся в случайных направлениях по территории размером с комнату. Один робот галящий, другие убегают. В какой-то момент времени галящий должен передать салку (роль галящего) ближайшему роботу.
Вижу три способа определить ближайшего:
1. Сначала передать сигнал со своим кодом на минимальное расстояние (10 см). Если никто не откликнулся, то увеличить расстояние до 20 см. И так увеличивать пока кто-то не отзовётся.
2. Передать сразу мощный сигнал со своим кодом, который получат все приёмники. Но тот, кто получит сигнал первым, должен раньше всех захватить себе роль (и как-то уведомить всех, что он был первым).
3. Похож на второй, но роботы должны уметь определять расстояние (время), которое прошёл сигнал от передатчика до приёмника. Пусть в режиме эхо. Галящим становится тот, у которого пройденное расстояние минимально (минимальное время прохождения сигнала).
В игре может присутствовать ещё один приёмник, типа судья, с которым роботы могут общаться по отдельному радио каналу.
Небольшая погрешность допускается. Например, два робота окажутся от галящего на расстоянии 22 и 26 сантиметров. Не страшно, если засален будет второй.
————
Реально ли сделать что-то такое бюджетно, то есть на микроконтроллерах ESP32 (а то и на ардуинах), и на дешёвых радио метках, датчиках, передатчиках итд с Алиэкспресса?
Andre
Сразу вспомнил автомобиль BMW штатная сигналка (брелок) срабатывает только около зеркала водителя типа защита от перехвата радиосигнала.
NFC метки работают на коротких расстояниях, питаясь от антенны. Но там не задать расстояние до метра.
Andy
Немного оффтоп, чисто теоретический вопрос, просто засел в голове, а знаний не хватает, чтобы ответить на него самостоятельно, и перестать думать.
Возможна ли передача радиосигнала с полезной нагрузкой на заданное очень маленькое расстояние (то есть не дальше чем заданное расстояние, измеряемое десятками сантиметров), и всё это за дёшево?
То есть можно ли сделать передатчик, которому можно сказать: передавай на 10 сантиметров, на 20 сантиметров, 30, 40... и где-то до метра.
И приёмник, который находится дальше заданного расстояния, уже не примет (либо проигнорирует) сигнал?
Для понятности искусственный пример: имеется двадцать маленьких роботов, размером с тарелку.
У каждого робота есть код, который он может передать в эфир (у одного робота число 1234, у другого 5941, у третьего 0694 например).
И они играют в догонялки — хаотично носятся в случайных направлениях по территории размером с комнату. Один робот галящий, другие убегают. В какой-то момент времени галящий должен передать салку (роль галящего) ближайшему роботу.
Вижу три способа определить ближайшего:
1. Сначала передать сигнал со своим кодом на минимальное расстояние (10 см). Если никто не откликнулся, то увеличить расстояние до 20 см. И так увеличивать пока кто-то не отзовётся.
2. Передать сразу мощный сигнал со своим кодом, который получат все приёмники. Но тот, кто получит сигнал первым, должен раньше всех захватить себе роль (и как-то уведомить всех, что он был первым).
3. Похож на второй, но роботы должны уметь определять расстояние (время), которое прошёл сигнал от передатчика до приёмника. Пусть в режиме эхо. Галящим становится тот, у которого пройденное расстояние минимально (минимальное время прохождения сигнала).
В игре может присутствовать ещё один приёмник, типа судья, с которым роботы могут общаться по отдельному радио каналу.
Небольшая погрешность допускается. Например, два робота окажутся от галящего на расстоянии 22 и 26 сантиметров. Не страшно, если засален будет второй.
————
Реально ли сделать что-то такое бюджетно, то есть на микроконтроллерах ESP32 (а то и на ардуинах), и на дешёвых радио метках, датчиках, передатчиках итд с Алиэкспресса?
https://digteh.ru/UGFSvSPS/power/#:~:text=%D0%92%D1%8B%D1%85%D0%BE%D0%B4%D0%BD%D0%B0%D1%8F%20%D0%BC%D0%BE%D1%89%D0%BD%D0%BE%D1%81%D1%82%D1%8C%20%D1%81%D0%B8%D0%B3%D0%BD%D0%B0%D0%BB%D0%B0%20%D0%BF%D0%B5%D1%80%D0%B5%D0%B4%D0%B0%D1%82%D1%87%D0%B8%D0%BA%D0%B0&text=%D0%AD%D1%82%D0%BE%20%D0%BE%D1%82%D0%BD%D0%BE%D1%88%D0%B5%D0%BD%D0%B8%D0%B5%20%D0%B0%D0%B1%D1%81%D0%BE%D0%BB%D1%8E%D1%82%D0%BD%D0%BE%D0%B3%D0%BE%20%D0%B7%D0%BD%D0%B0%D1%87%D0%B5%D0%BD%D0%B8%D1%8F%20%D0%BC%D0%BE%D1%89%D0%BD%D0%BE%D1%81%D1%82%D0%B8,%D0%BA%20%D0%BC%D0%BE%D1%89%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D1%81%D0%B8%D0%B3%D0%BD%D0%B0%D0%BB%D0%B0%201%20%D0%BC%D0%92%D1%82.
ну и гуглить чувствительность приемника
Andre
https://digteh.ru/UGFSvSPS/power/#:~:text=%D0%92%D1%8B%D1%85%D0%BE%D0%B4%D0%BD%D0%B0%D1%8F%20%D0%BC%D0%BE%D1%89%D0%BD%D0%BE%D1%81%D1%82%D1%8C%20%D1%81%D0%B8%D0%B3%D0%BD%D0%B0%D0%BB%D0%B0%20%D0%BF%D0%B5%D1%80%D0%B5%D0%B4%D0%B0%D1%82%D1%87%D0%B8%D0%BA%D0%B0&text=%D0%AD%D1%82%D0%BE%20%D0%BE%D1%82%D0%BD%D0%BE%D1%88%D0%B5%D0%BD%D0%B8%D0%B5%20%D0%B0%D0%B1%D1%81%D0%BE%D0%BB%D1%8E%D1%82%D0%BD%D0%BE%D0%B3%D0%BE%20%D0%B7%D0%BD%D0%B0%D1%87%D0%B5%D0%BD%D0%B8%D1%8F%20%D0%BC%D0%BE%D1%89%D0%BD%D0%BE%D1%81%D1%82%D0%B8,%D0%BA%20%D0%BC%D0%BE%D1%89%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D1%81%D0%B8%D0%B3%D0%BD%D0%B0%D0%BB%D0%B0%201%20%D0%BC%D0%92%D1%82.
ну и гуглить чувствительность приемника
Вся эта информация о расстояниях порядка километров, о мощных передатчиках, и не про определение точных расстояний, к сожалению.
Я понимаю, что чем мощнее передатчик, тем дальше может быть приёмник.
Но там нет ответа, можно ли сделать так, чтобы приёмник среагировал только на сигнал, ближе 30 сантиметров, а на расстоянии 50 сантиметров уже игнорировал сигнал.
Andy
Вся эта информация о расстояниях порядка километров, о мощных передатчиках, и не про определение точных расстояний, к сожалению.
Я понимаю, что чем мощнее передатчик, тем дальше может быть приёмник.
Но там нет ответа, можно ли сделать так, чтобы приёмник среагировал только на сигнал, ближе 30 сантиметров, а на расстоянии 50 сантиметров уже игнорировал сигнал.
ок, краткий ответ можно. Но лучше это в профильном канале обсудить тогда. Например тут https://t.me/dayradiospb
Andre
ок, краткий ответ можно. Но лучше это в профильном канале обсудить тогда. Например тут https://t.me/dayradiospb
О, спасибо этому дому, пойду к другому. )
Серж
День добрый ! )))
Подскажите пожалуйста ... может кто видел )
Есть какой простой веб интерфейс, но только для есп32 ???
ну чтоб там ползунки можно было просто выставить или поля для ввода чисел ...
но хотелось как бы открытый код, чтоб настраивать можно )))
Серж
ну и настройки WiFi
 Юрий
Юрий
Смотрите пример для espcam
Николай
 Серж
Серж
https://youtu.be/2ENfEabxGSU
Серж
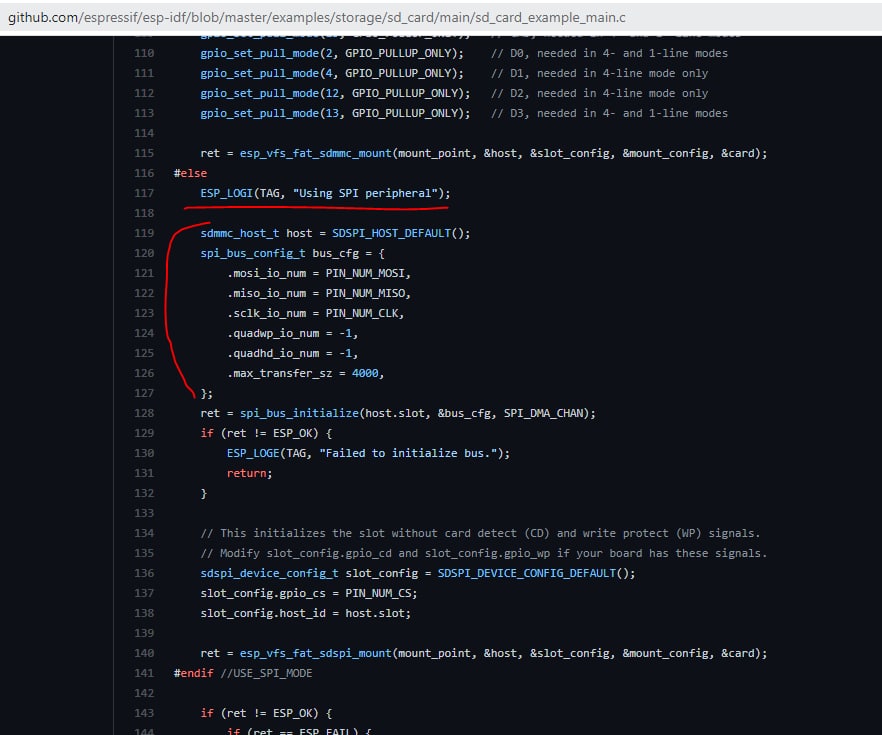
подскажите, а кто пробовал вот это запускать на есп32 ???
Серж
тут как бы вопрос реально ли это ???
Anonymous
 Anonymous
Anonymous
 Anonymous
Anonymous
К моему датчику, адрес видит 0x76
Anonymous
Id нет
Anonymous
Продаю поставить библиотеку bmp180
Anonymous
Пробую
Anonymous
У hoperf тоже есть подобные сенсоры
Anonymous
 Anonymous
Anonymous
Ни bmp080 ни 180 не определился...
Anonymous
Да, находит, адрес 0x76
Anonymous
Первый скрин
Anonymous
Датчик этот не куплен. , А выпаян с неизвестной Платы
Anonymous
Так что не понятно что это
Anonymous
Да, не факт
Anonymous
Размеры и внешние вид как у bmp280
 Slava
Slava
Размеры ничего не значат, это вообще может быть гипоскоп 😜
Slava
Откуда выпаял?
Anonymous
Хм...думал гироскопы в черных пластиковых корпусах