 Bastad
Bastad


Хуже меня
 ОлегЪ
ОлегЪ

 Beryl
Beryl
ну это.. они конечно способны испускать звуковые волны, но я не это имел ввиду
 Carl
Carl
Вечер добрый, анархисты
Beryl
я имел ввиду нормальные фирменные динамики. Бывает что маломощная аппаратура дает супер звук
Beryl
а мощная плохой
 Johnny
Johnny
Знаю цену своему времени прост
все знают цену своему времени. Но кто то ещё может уделять любимому занятию его
Beryl
с мощностью не коррелирует
 shadowsoul
Carl
shadowsoul
Carl
Купил я себе ардуину с кучей барахла. Сижу мучаюсь
Помогите гуманитарию
Johnny
с мощностью не коррелирует
значит и ламповые усилки с определенной АС будут звучать лучше чем транзисторные?
Beryl
ну блин звук от многих факторов зависит
Carl
Есть кто по Arduino может проконсульитровать?
Beryl
но в целом ламповые усилки звучат плохо на мой вкус. Я люблю чистый звук без искажений, там где их быть не должно
Carl
Гиростабилизатор для твердотоплевного двигателя сделать
Johnny
Гиростабилизатор для твердотоплевного двигателя сделать
да для этого и аттини подойдет, я то думал...
Johnny
думал хотя бы диодом мигать
Carl
Я слишком гуманитарий, нужен совет
Beryl
гитара например с искажениеми звучит приятно, а фортепиано чудовищно
Johnny
Я слишком гуманитарий, нужен совет
мне кажется ты немного не тот смысл вкладываешь в слово "гуманитарий"
Carl
гитара например с искажениеми звучит приятно, а фортепиано чудовищно
Если это не гитара "Zombie". Вот она даже на дорогущей лампе звучит отвратно)
Carl
Крч, буду признателен, если найдётся тут знающий человек
Beryl
Если это не гитара "Zombie". Вот она даже на дорогущей лампе звучит отвратно)
в прямых руках и она звучит
Johnny
Если это не гитара "Zombie". Вот она даже на дорогущей лампе звучит отвратно)
lurkmore.to/гитара_урал
Beryl
но да, речь не об этом
 Anonymous
Anonymous
:P
Anonymous
читал
Anonymous
давненько
Anonymous
о.о
Anonymous
а, ты про лурк в целом?
ОлегЪ
Крч, буду признателен, если найдётся тут знающий человек
задавай прямые вопросы, поможем чем сможем
Carl
задавай прямые вопросы, поможем чем сможем
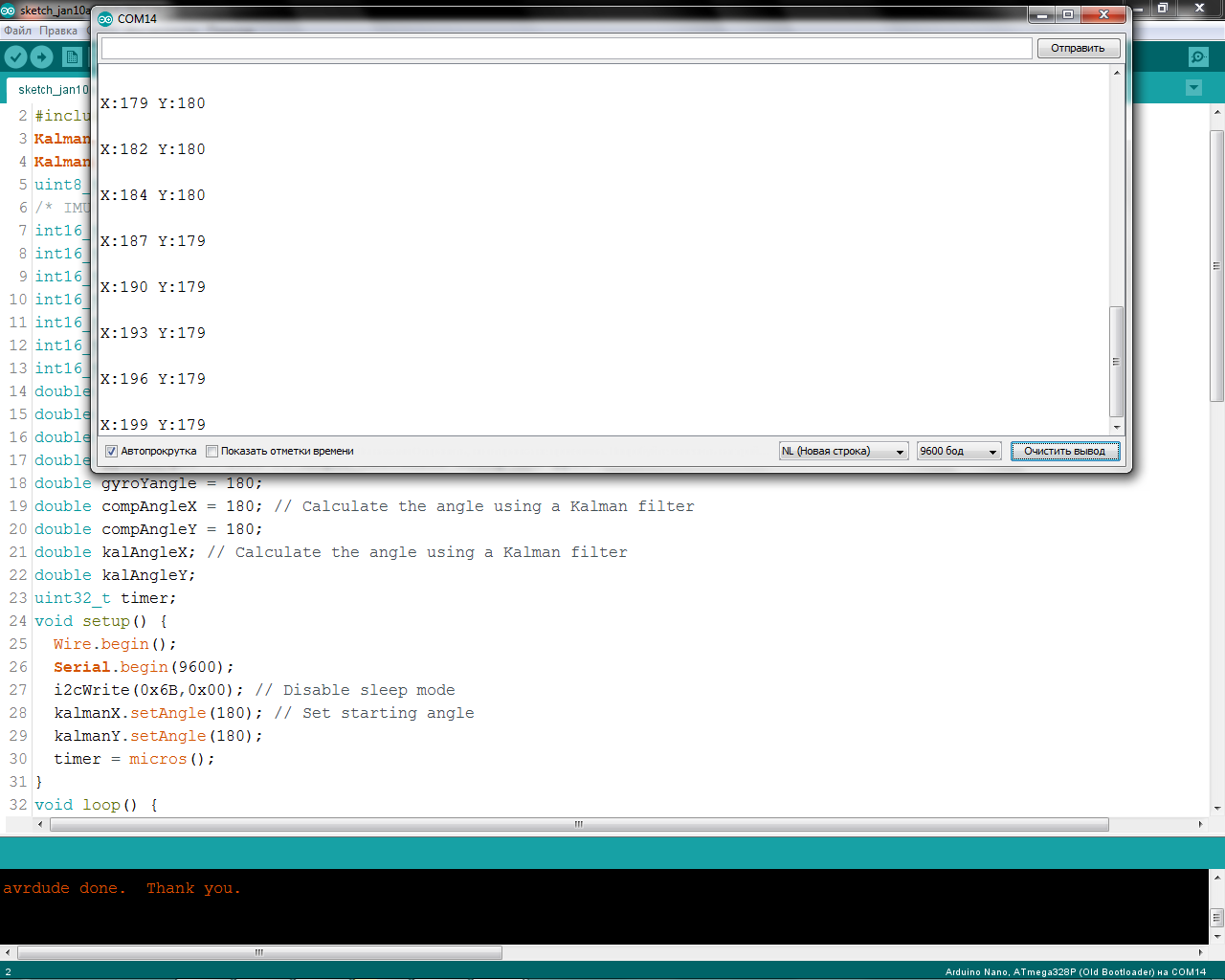
Крч. Подключил гироскоп к плате, загрузил скетч. Открываю монитор порта, а там пусто
Даже сообщение об ошибке не пишет
 Артем
Артем
все знают цену своему времени. Но кто то ещё может уделять любимому занятию его
не все, я не знаю пока
ОлегЪ
Крч. Подключил гироскоп к плате, загрузил скетч. Открываю монитор порта, а там пусто
Даже сообщение об ошибке не пишет
скетч из примера? гироскоп и либы совпадают? проводки проверял (с ними оч часто проблемы)?
ОлегЪ
можно и скетч приложить
Johnny
не все, я не знаю пока
для этого надо выучиться на прогера. Или не учится, а самому типа, для проженья ни дипломов щас ненадо, ни вообще нихера. Тогда автоматически ценность времени будет чувствоваться
Артем
Carl
#include <Wire.h>
#include "Kalman.h"
Kalman kalmanX;
Kalman kalmanY;
uint8_t IMUAddress = 0x68;
/* IMU Data */
int16_t accX;
int16_t accY;
int16_t accZ;
int16_t tempRaw;
int16_t gyroX;
int16_t gyroY;
int16_t gyroZ;
double accXangle; // Angle calculate using the accelerometer
double accYangle;
double temp;
double gyroXangle = 180; // Angle calculate using the gyro
double gyroYangle = 180;
double compAngleX = 180; // Calculate the angle using a Kalman filter
double compAngleY = 180;
double kalAngleX; // Calculate the angle using a Kalman filter
double kalAngleY;
uint32_t timer;
void setup() {
Wire.begin();
Serial.begin(9600);
i2cWrite(0x6B,0x00); // Disable sleep mode
kalmanX.setAngle(180); // Set starting angle
kalmanY.setAngle(180);
timer = micros();
}
void loop() {
/* Update all the values */
uint8_t* data = i2cRead(0x3B,14);
accX = ((data[0] << 8) | data[1]);
accY = ((data[2] << 8) | data[3]);
accZ = ((data[4] << 8) | data[5]);
tempRaw = ((data[6] << 8) | data[7]);
gyroX = ((data[8] << 8) | data[9]);
gyroY = ((data[10] << 8) | data[11]);
gyroZ = ((data[12] << 8) | data[13]);
/* Calculate the angls based on the different sensors and algorithm */
accYangle = (atan2(accX,accZ)+PI)*RAD_TO_DEG;
accXangle = (atan2(accY,accZ)+PI)*RAD_TO_DEG;
double gyroXrate = (double)gyroX/131.0;
double gyroYrate = -((double)gyroY/131.0);
gyroXangle += kalmanX.getRate()*((double)(micros()-timer)/1000000); // Calculate gyro angle using the unbiased rate
gyroYangle += kalmanY.getRate()*((double)(micros()-timer)/1000000);
kalAngleX = kalmanX.getAngle(accXangle, gyroXrate, (double)(micros()-timer)/1000000); // Calculate the angle using a Kalman filter
kalAngleY = kalmanY.getAngle(accYangle, gyroYrate, (double)(micros()-timer)/1000000);
timer = micros();
Serial.println();
Serial.print("X:");
Serial.print(kalAngleX,0);
Serial.print(" ");
Serial.print("Y:");
Serial.print(kalAngleY,0);
Serial.println(" ");
// The accelerometer's maximum samples rate is 1kHz
}
void i2cWrite(uint8_t registerAddress, uint8_t data){
Wire.beginTransmission(IMUAddress);
Wire.write(registerAddress);
Wire.write(data);
Wire.endTransmission(); // Send stop
}
uint8_t* i2cRead(uint8_t registerAddress, uint8_t nbytes) {
uint8_t data[nbytes];
Wire.beginTransmission(IMUAddress);
Wire.write(registerAddress);
Wire.endTransmission(false); // Don't release the bus
Wire.requestFrom(IMUAddress, nbytes); // Send a repeated start and then release the bus after reading
for(uint8_t i = 0; i < nbytes; i++)
data [i]= Wire.read();
return data;
}
Вот собственно скетч
библиотеки все подключил
Carl
Скачал по ссылке из гайда
Вот ссыль
https://iarduino.ru/file/209.html
 ОлегЪ
ОлегЪ
что то пишет, но у меня самого гироскопа нет
Carl
У меня ничерта нет в мониторе порта
Carl
Что за магия?
Carl
100 раз перепроверил
Даже в скетче и в мониторе менял скорость
ОлегЪ
попробуй голую ардуину без гироскопа и другой обвязки
Johnny
просто брак может быть
Johnny
модули китайские небось
Carl
 ОлегЪ
ОлегЪ
100 раз перепроверил
Даже в скетче и в мониторе менял скорость
и покажи лог загрузки в ардуину
Carl
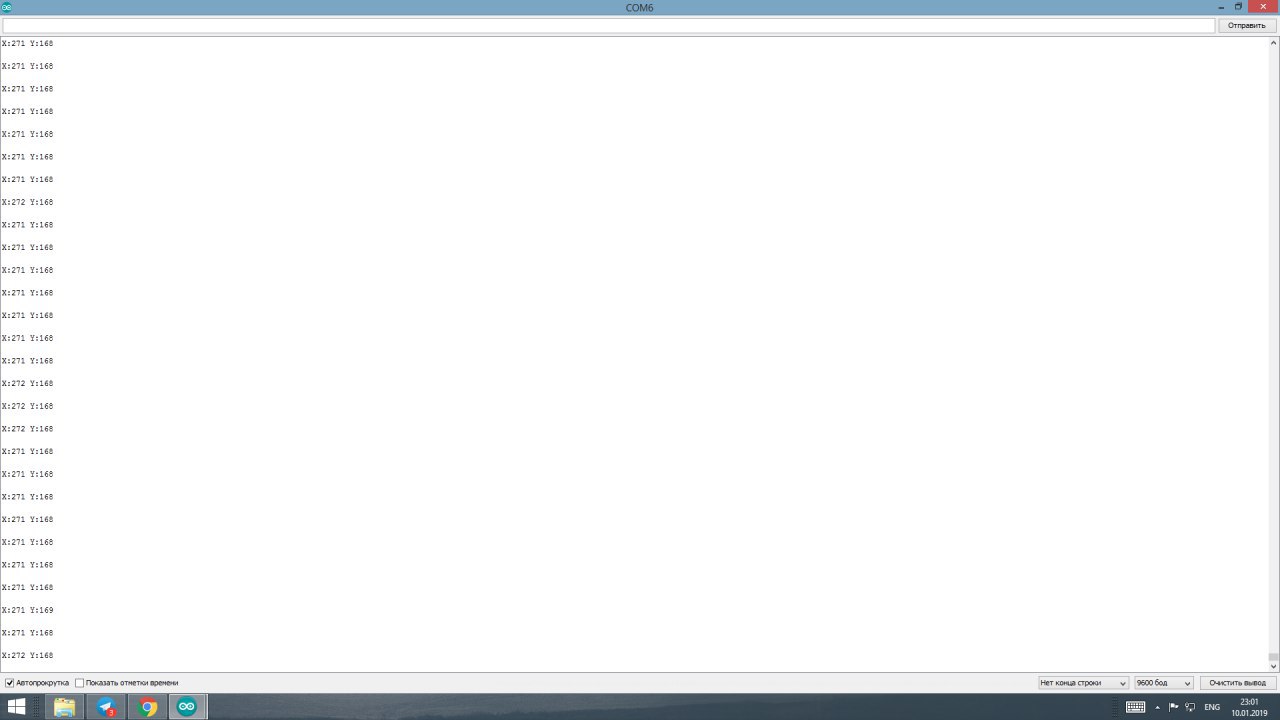
Вот с голой ардуиной тоже цифры поплыли
Carl
На модуль грешить тогда стоит?
Carl
 ОлегЪ
ОлегЪ
было бы не плохо проверить напряжение на ардуйне с модулем и без
Johnny
 Carl
Carl
Подключил модуль - сразу показания перестали обновляться
ОлегЪ
uint8_t IMUAddress = 0x68;
вот тут еще может быть косяк
ОлегЪ
я бы поискал других примеров. Без самого модуля я вряд ли еще смогу что то подсказать
Bastad